Hey, I wanted to share a cool project I made that sorts waste using a micro:bit and a camera module from Hiwonder along with other components. The camera can recognize the type of waste and then the micro:bit reads that information using the I2C protocol. After that, the MP3 module will announce the type of waste and the OLED display module will show the result. Finally, the corresponding trash bin will open so that I can throw the waste away properly.
The process of my robot goes like this:
1.The WonderCam vision module recognizes the waste
2.The micro:bit controller reads the type of waste recognized by the WonderCam module through the I2C protocol
3.The MP3 module announces the type of waste
4.The OLED display shows the type of waste
5. The servo rotates to open the correct trash bin

Here’s a list of the components I used:
Here’s a list of the components I used:
1 * micro:bit board
1 * micro:bit expansion board
1 * WonderCam vision module
1 * MP3 module
1 * OLED display module
4 * LEGO servos
4 * trash bins
1 * I2C converter
1 * board
4 * 4PIN wires
4 * servo extension wires
Several screws
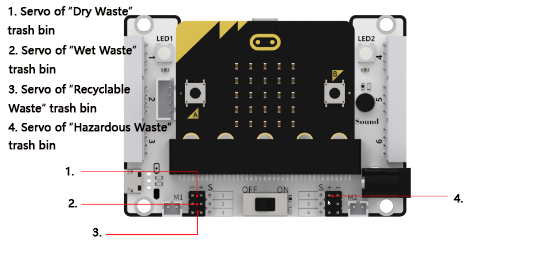
Hardware Connection:

That’s it for my project on waste sorting using micro:bit and some other cool modules! I hope you guys enjoyed reading about it and found it informative.
If you have any questions about this project or want to share your own cool micro:bit projects, please feel free to leave a comment. I’m always excited to hear from fellow micro:bit enthusiasts! Thanks for reading, and until next time, happy coding!